


文|123观察室
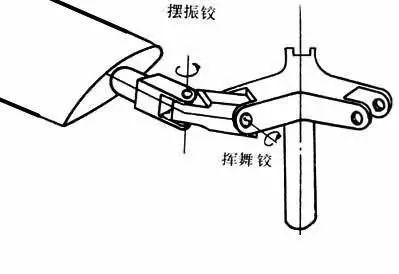
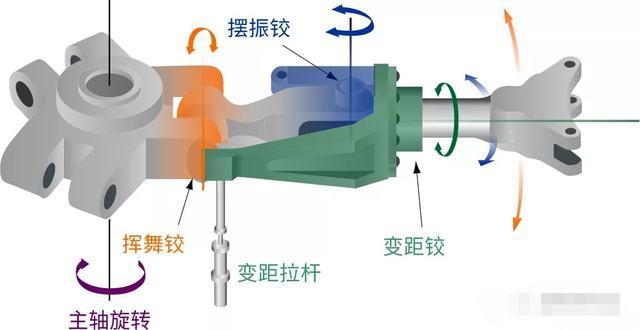
直升机的桨毂是非常复杂的,桨毂上连接着桨叶,大部分是四旋翼。四旋翼和桨毂并没"亲密接触",而是通过变距铰,摆振铰(左右运动)链和挥舞铰(上下运动)柔性连接。变距铰通过变距拉杆和旋转斜盘相连,旋转斜盘周期性的"前后左右"倾斜,从而带动旋翼发生周期性的偏转,让整个桨盘(旋翼平面)发生倾斜,控制直升机全向机动。这在笔者之前的文章中做过仔细分析。今天就来聊聊摆振铰和挥舞铰那点事。因为旋翼旋转时左右两侧会产生速度差和旋翼根部"疲劳",如果得不到解决,旋翼会断裂,或者机身不可控横滚。

旋翼旋转时,因为机翼尖的角速度最大,所以其升力也最大,这个力就会让旋翼上翘,让整个桨盘(旋翼平面)呈圆锥型。以逆时针旋转到旋翼为例,其左侧都是后行"桨",右侧都是前行"桨",如果此时直升机是向前行驶的,参考顺水/逆水行舟的实例,左侧旋翼的速度是线速度减去直升机的前行速度,而右侧都旋翼刚好相反,那么两侧的速度差就会导致直升机向左横滚,这是非常危险的,直升机的可控横滚后面会讲。
所以,挥舞铰就出现了,左侧旋翼因为升力较小,旋翼会下垂,旋翼相对于空气的角度会变化,所以升力会增加,旋翼会沿挥舞铰向上摆动;右侧旋翼刚好相反,旋翼受到的升力增加,会向上"翘",升力会减小,前行"桨"会沿挥舞铰向下运动,从而让左右两侧是升力实现平衡。我们想一想固定翼飞机升降舵就能明白,升降舵上升,飞机抬头,升降舵下降,飞机低头。直升机在实际飞行中,左右两侧的速度差会达到五倍,所以旋翼的俯仰会更加明显。
前面说过沿旋翼斜面的力可以分解为水平方向的"拉力"和垂直方向的升力,水平方向的力和动力轴旋的方向是相反的,前行"桨"的速度快,阻力大,而后行"桨"刚好相反,并且呈周期性交替。所以,为了减少旋翼根部的"疲劳",让旋翼的后掠角度发生改变,摆振铰出现了,其可以左右摇摆,减少旋翼的疲劳。当然,挥舞铰和摆振铰都是有阻尼机构控制,所以能够上下,前后运动。
水平方向的阻力还会让机身产生扭矩,就是动力轴给了旋翼一个垂直旋翼的动力,那么和发动力相连的机身就会有一个相反的扭矩,如果把抵消,机身就会和旋翼一样旋转,不过方向是相反的,所以,尾部的尾桨出现了,其把机身"拉住了",抵消了扭矩。以中国的"直20"为例,其尾桨和机身垂直平面是有一个角度的,目的是让尾桨产生一个向上的分力(拉力),和水平小短尾翼配合,提高直升机的升力。尾桨的动力来自涡轴发动机,通过传动轴和转向齿轮输送到尾桨,并非独立的发动机提供动力。
当然,随着技术的进步,三大铰链已经更新换代,出现了一系列的替代方案。因为随着旋翼数量的增加,摆振铰和挥舞铰会更加复杂,重量也会增加,导致旋翼可靠性降低。在我国直20身上,就出现了诸多的桨毂黑科技。可以这么说,除了涡轴发动机,在直升机飞行控制系统方面,我们已经位居世界前列。我们的科研工作者已经非常优秀,请再给他们一点时间。

最后,对未来的直升机做一番设想:尾桨会取消,变成和固定翼飞机一样的推进式"螺旋桨"。而涡轴发动机产生的机身自旋扭矩,会通过共轴反转双旋翼来克服,在消除自旋力矩的同时,将升力提高两倍,并且刚性共轴双旋翼技术的发展,可以让共轴双旋翼直接的距离缩短,不用想卡50那样长,飞行阻力会小很多。这样,直升机就会突破现有的技术瓶颈,走向高速直升机时代。因为尾部安装了推进式"螺旋桨",所以,旋翼变距系统很可能被取消,最终飞行轨迹有共轴双旋翼和尾部"螺旋桨"来"合成",在这种技术下,直升机就可以"全向矢量飞行"!

本文由军迷圈转码显示 查看原文
查看原文
