


文|谷火平
撰文:从人持戈
8月24日,搭载有智能机器人"费奥多尔"的"联盟MS-14"号飞船仍未能与国际空间站完成对接。据俄罗斯卫星社报道,本次发生 的空间对接失败是由于Kurs对接系统故障导致,飞船在距离空间站99米处不断徘徊,然后又后退至空间站279米的地方。在启动备份系统失败的情况下,位于地面的飞行控制中心远程操控飞船离开了国际空间站。8月26日凌晨,驻国际空间站的宇航员更换了空间对接模块中出现故障的信号放大器,国际空间站也调整了运行轨道为即将到来的第二次对接做好准备。如果再次失败,机器人"费奥多尔"将重新返回地球。

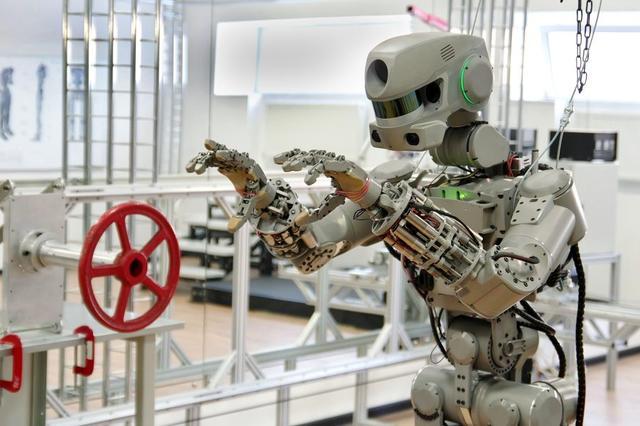
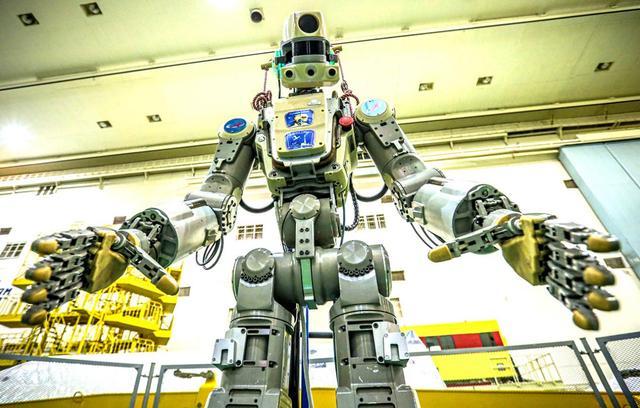
本次搭载在俄罗斯"联盟MS-14"飞船的"费奥多尔"是一款用于协助宇航员工作的人型机器人,任务期间将由俄罗斯宇航员亚历山大∙斯克沃尔佐夫利使用专用航天服控制。在飞船发射前俄罗斯还专门为这台四手机器人开通推特账户。根据任务计划,"费奥多尔"将在国际空间站承担外壳清理、协助照明、维修供电系统的试验。未来还将承担救援行动和其他太空高风险任务。

这台身高超过1.8米,体重近半吨的机器人也并非只是冷冰冰的机器。俄罗斯相关科研机构在机器人"费奥多尔"上安装了人工智能元件使其具有开玩笑、对话的能力。据称,"费奥多尔"相当幽默且善于交际可以同人类进行任何主题的对话。这些能力已经得到证明,8月22日,"费奥多尔"向地面的报告中就谈到自己在发射期间承受了正常范围的过载。还引用了加加林的话"我们飞吧"来纪念自己飞向空间站。
为了不让失败的空间对接使原计划的任务化为泡影,俄罗斯已经开始为第二次空间对接做准备。8月26日,先前发射的"联盟MS-13"号飞船目前已经脱离国际空间站的"星辰"模块舱为搭载"费奥多尔"的"联盟MS-14"号飞船空出接口。
目前,空间站人员已经使用备用信号放大器更换掉出现故障的信号放大器。
在航天器的太空对接过程中需要各种各样的传感器精确的控制航天器运行轨道。在进行太空对接时,航天器虽经减速但仍维持在7千米每秒以上的速度,稍有误差就会造成悲剧。

即使第二次对接工作失败,俄罗斯依然不会放弃"联盟MS-14"。目前已经有不少传言说,如果"联盟MS-14"与国际空间站的第二次对接失败,"联盟MS-14"将会被带离轨道坠毁至海洋。对此,来自俄罗斯联邦航天局新闻处的权威人士反驳了这种说法,"联盟MS-14"飞船可以在系统控制下长期自动飞行,在必要时可以按照降落计划返回地球。沉没"联盟MS-14"飞船是一知半解之人的愚蠢之见,这种方案根本未被考虑。
本文由军迷圈转码显示 查看原文
查看原文
