

文|楚人陈奇雄
中国于2016年6月发射的“遨龙一号”太空机器人,能在浩瀚太空执行哪些任务?美国媒体与中国官方的说法截然不同。美国媒体称,“遨龙一号”有潜在军事用途,它可用机械臂“活捉”敌方卫星;中国官方则强调,“遨龙一号”没有军事用途,它只是一台用于清除太空垃圾的环卫机器人。
太空机器人,像所有机器人一样,只是一种工具。进入太空时代后不久,人类就开始了太空机器人的研制工作。
人类研制太空机器人初心,是想让它协助或代替宇航员,在强辐射、高真空、微重力、极冷或极热的恶劣太空环境中,从事危险与高难度的太空作业任务。让太空机器人执行诸如抓捕敌方卫星、破坏敌方空间站之类的任务,则只是太空机器人用途的自然扩展。
实话实说,在太空机器人研制方面,中国起步要比美俄欧日等传统航天强国要晚,但中国进步很快。我们必须承认的是,美国是当仁不让的太空机器人研制第一大国与强国;俄加德日英,则处于太空机器人研制第二梯队;中国在太空机器人研制方面,与美俄欧相比,尚有一定差距。
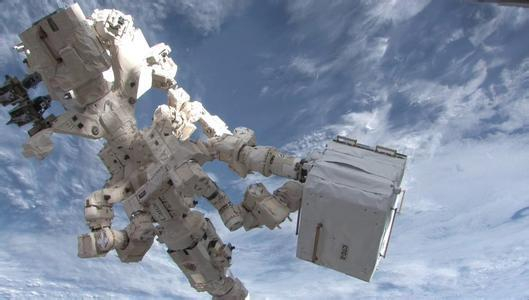
(下为太空机械臂协助宇航员作业场面)
太空机器人,到底是一种什么样的机器呢?中国武汉华中科技大学材料科学与工程学院的陈松威,在其撰写的《空间机器人的研究现状和发展趋势》论文中指出,太空机器人,又叫空间机器人,它既可以代替人类宇航员进行长时间、危险的舱外作业,也可以作为宇航员的工具,协助宇航员完成高精度、高可靠度的操作任务。太空机器人在美欧日等国的太空探索活动中,已经获得广泛应用。
按照用途不同,太空机器人可以分为舱内/舱外服务机器人、自由飞行机器人和星球探测机器人三大类。
舱内太空机器人,是一种航天器舱内使用的机器人,它主要被用来协助航天员进行舱内科学实验以及执行对航天器维护任务,中国的“神舟-11”号飞船上,就装备有舱内太空机器人;舱外服务机器人主要执行卫星维修、空间装配、空间加工和科学实验等任务,美国已退役的航天飞机、正在运行的国际空间站上,就配装有舱外服务机器人,这些舱外服务机器人,可以由航天飞机内或空间站内的宇航员遥控操作,执行种类繁多的任务。
在舱外太空服务机器人研制方面,水平最高的不是美国,而是加拿大。美国航天飞机与国际间站上,都配装有由加拿大研制的舱外服务太空机器人。
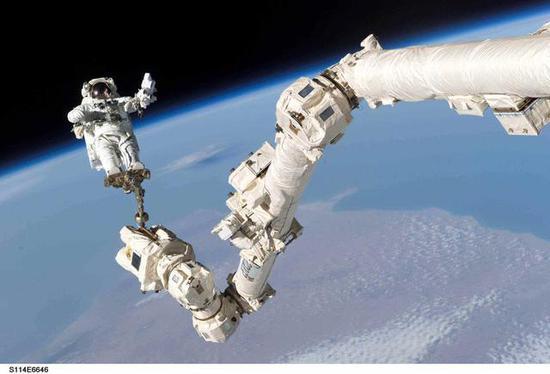
(下为太空机械臂工作场景)
加拿大研制的航天飞机操作臂系统,是空间机器人概念产生以来,第一款被成功应用于太空作业的机械臂系统,于1981年投入使用,是为美国航天飞机研制的配套产品。它可以由计算机生成的程序自动控制,也可由航天飞机上的宇航员在舱内进行手动操作。该机械臂主要从事发射与回收卫星、组装国际空间站、向接受维修的航天器传送部件等工作。2005年,在该机械臂协助下,美国“发现者号”航天飞机的宇航员,在太空成功完成了对“发现号”航天飞机热防护系统的维修工作。 该机械臂全长15.2 米,质量410 公斤,拥有六个自由度。在空载情况下,它的最大移动速度可达每秒60厘米。其臂杆采用高强度、低密度碳纤维材料制成。
空间站移动服务系统太空机器人,是加拿大耗资10亿美元,花费10年时间研制成功的另一型舱外服务太空机器人。它由三部分组成:一是长17 米的7自由度机械臂系统;二是专用机械臂末端灵巧机械手;三是移动平台系统。在遥控操作方式下,它可以在轨道上移动空间站的外围设备,可以在舱外行走,也可以进行装配和维修工作。安装在机械臂末端的灵巧机械手,能完成一些特别复杂的操作任务,如给接受维修服务的对象拧紧螺丝、接好管道、联上电线等。2001年4月,装备在国际空站上的该型舱外服务机器人,将一个1吨多重的包装箱,传递给美国“奋进者号”航天飞机上的机械臂。这是有史以来,两个航天器所用太空机器人的机械臂,首次在太空中成功“握手”。
(下为宇航员维修“哈勃”太空望远镜场面)

在太空机器人研制方面,德国也实力不弱。德国研制的舱内与舱外服务太空机器人,以智能化程度高、动作灵活、可在窄小空间内进行精细作业而著称。
如德国宇航中心研制的小型空间机器人系统ROTEX,是世界上第一个实现地面遥控操作的舱内空间机器人系统。ROTEX机器人装有六自由度机械臂,可在1立方米小的空间内进行精细作业,其机械臂末端装有刚性和柔性六维力/力矩传感器,还装有触觉传感器、激光测距传感器和微型立体摄像机等多种类型的传感器。 该机器人可执行空间物体装配、连接或断开电气插头和抓握自由漂浮物等任务。
德国宇航中心在1997年,于世界上最早提出了机器人宇航员概念。机器人宇航员,本质上是一种舱外服务机器人,但它比遥控操作的太空机械臂具有更高智能,具有更强自主作业能力。
德国宇航中心开发的第三代机器人宇航员,采用全模块化思想设计。它是一款有两只手臂、两个多指灵巧手、一对摄像机组“眼睛”与多种传感器的“机器人”,它搭载在机动能力很强的“救援卫星”上,可执行接近、捕获和维修故障卫星任务。
我们知道,有时候,卫星被发射进入轨道后,会发生太阳能电池板不能自动打开故障或其它故障,而卫星所在轨道,往往是载人航天飞机无法到达的高轨道,也就是说,不可能派航天飞机携载人类宇航员去维修故障卫星。在这种情况下,德国宇航中心就提出要建造一种可在太空对“故障卫星”进行维修作业的“救援卫星”,“救援卫星”的机动能力很强,可以追上“故障卫星”,并用其所带机器人宇航员,对“故障卫星”进行维修保养。
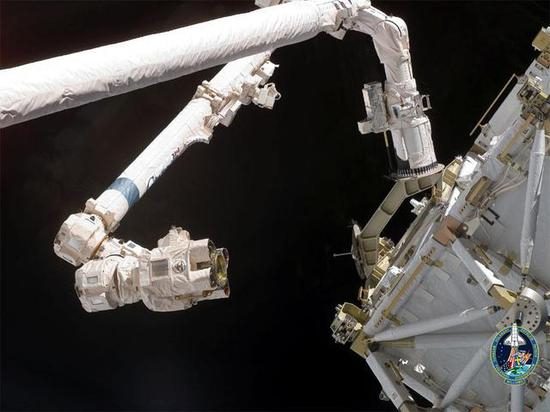
(下为太空机器人传送零部件给人类宇航员场景)

在太空机器人研制方面,美国实力最为雄厚,取得的成果也最丰硕。1993年,美国宇航局启动了空间机器人大型研究项目。1999年,美国宇航局研制出仿人型机器人宇航员Robonaut,它的灵巧手具有与人手相近的抓取力。Robonaut的热承受能力、在恶劣环间中的持续作业能力,远远超过人类宇航员;它的手臂拥有7个自由度,其运动范围,超过人类手臂。它能够熟练使用大部分的舱外作业工具单独作业,也可以和人类宇航员协同工作。更重要的是,人类操作者只需戴上头盔、数据手套和跟踪器,就可在航天飞机舱内甚至在地面控制站中,对Robonaut进行远程遥控操作。
美国国防高级研究计划局研制的“轨道快车”太空机器人,则是一款可自由飞行的太空机器人。它可以执行为在轨卫星提供燃料补充、更新电气设备和蓄电池等服务。“轨道快车”由三部分组成:一是可以作长时间大机动飞行的卫星基座;二是智能机械臂;三是对接机构。其中,卫星基座是美国货;智能机械臂是加拿大产品;对接机构是标准货架产品。卫星基座负责发现与追踪目标卫星;机械臂执行将目标卫星“抓捕”、“绑住”任务,并完成对目标卫星的维修工作,如将目标卫星上的失效零部件拆下,并将新的零部件换上去;对接机构拥有标准接口,可在机械臂帮助下,与目标卫星的相应机构对接,并负责将“轨道快车”与目标卫星联接在一起,以方便机械臂对目标卫星进行维修作业。
(下为星球机器人探测火星场面)

2007年3月,美国将“轨道快车”太空机器人与目标卫星,发射到轨道上进行测试。在测试中,“轨道快车”首先飞行到离目标卫星仅10到20厘米距离;接着,“轨道快车”上的机械臂温柔地捕获了目标卫星,并将目标卫星拉到“轨道快车”身边;然后,轨道快车上的对接机构与目标卫星上的相应对接装置进行连接;“轨道快车”与目标卫星锁到一起后,机械臂则开始给目标卫星更换零部件,并打开管道给目标卫星补充燃料。
理论上,美国的“轨道快车”太空机器人,既可给己方卫星提供维修服务,也能“抓捕”或“摧毁”他国卫星。
日本是一个野心很大的国家,他们在发展太空机器人方面,也是不遗余力。早在1997年11月,日本就发射了“工程实验7号”卫星,以进行空间机器人技术研究。“工程实验7号”卫星,是日本发射的第一个遥控式自由飞行空间机器人,它的机械臂长约2米,重150公斤,拥有6个自由度。它能执行空间维修、空间装配等任务。
英国轨道修复公司与荷兰航天局合作,正在研制一款名为“在轨卫星修复系统”的空间机器人,用以延长在轨大型通信卫星的寿命。这款空间机器人的最大特点是,它可抓捕远在3.6万公里高地球同步静止轨道上的通信卫星,并执行诸如给通信卫星更换太阳能电池帆板、给通信卫星补充燃料、更换机电单元等任务,可以使通信卫星的寿命延长10年或更多。通讯卫星的寿命每延长一年,可创造的新价值约5千万美元。其寿命延长10年的话,就意味着可创造新价值5亿美元。
在星球探测机器人研制方面,美俄已成功发射多种类型的星球探测机器人,如探月、探火星、探小行星机器人;日本与印度,也发射了自己的星球探测机器人;中国正在迎头赶上。中国发射的“嫦娥”系列探月机器人,属于整体技术达国际先进水平的星球探测机器人。因星球探测机器人不是我们今天讨论的重点,所以我们就在此打住。
(下为中国研制的探月机器人工作情景)

航天专家认为,在太空探索活动中,太空机器人的作用越来越重要。过去只能由人类宇航员亲自进行的很多苦活、累活、脏活、危险活,将更多地由遥控操作、半自主操作、甚至完全自主操作的太空机器人来干。 随着微电子技术、光学技术、传感器技术、微机电技术、人工智能技术的发展,太空机器人的视、听、触、压、味等感觉越来越灵敏,其动作的准确性越来越高、其手臂力量的变化范围越来越大……它可执行的任务种类,也越来越多。
也许,下一代太空机器人,是太空医生与维修工人,它可上天执行维修航天器任务,如通过给失效的卫星、太空望远镜、空间站更换部件,让其起死回生,重新工作;下一代太空机器人,也是太空猎人与驯龙高手,它可进入太空,“生擒活捉”别国卫星,并对别国卫星进行改造,让别国卫星为己方服务。
(下为太空机器人使用的灵巧机械手)

本文由军迷圈转码显示 查看原文
查看原文
